


辛格林納多軸智能驅(qū)動給予并聯(lián)機器人強勁動能
辛格林納多軸伺服案例應(yīng)用
并聯(lián)機器人定義為動平臺和定平臺通過兩個或以上獨立的運動鏈相連接,結(jié)構(gòu)具有兩個或兩個以上的自由度,通過并聯(lián)的方式來驅(qū)動的一種閉環(huán)機構(gòu)。
并聯(lián)機器人通過電機置于定平臺上的方式,保證了運動部分的輕量化設(shè)計,能夠達到重量輕、速度高、節(jié)拍快的特點。配合視覺檢測系統(tǒng)和動態(tài)抓取,其廣泛應(yīng)用于食品、醫(yī)藥、電子等輕工業(yè),在物料的搬運、包裝、分揀等方面有著無可比擬的優(yōu)勢,大幅度提高了流水線上的生產(chǎn)效率。
1 設(shè)備主要結(jié)構(gòu)
常見的并聯(lián)機器人如下圖所示的四軸機器,能夠沿三位空間X、Y、Z軸平動和繞Z軸旋轉(zhuǎn)的功能。其機械結(jié)構(gòu)通過電機連接減速機后直連主臂,主臂通過限位器連接副臂,在定平臺上或者動平臺上會有第四軸用于繞Z軸旋轉(zhuǎn)。運動時,電機帶動主臂在一定角度內(nèi)上下擺動,帶動副臂實現(xiàn)動平臺的精準定位動作。

圖1 設(shè)備主要結(jié)構(gòu)
2 Ωm-N1伺服驅(qū)動器
本方案采用了辛格林納(Sigriner)Ωm-N1系列多軸伺服驅(qū)動。該系統(tǒng)采用EtherCAT總線通訊,基于直流母線動力架構(gòu),支持多驅(qū)動單元級連供電,三軸一體和四軸一體可以靈活定制,滿足不同的應(yīng)用場景。
3 設(shè)備主要結(jié)構(gòu)

圖2 系統(tǒng)配置圖

圖3 穿墻安裝式伺服
方案主要配置如上圖所示,機器人控制系統(tǒng)通過EtherCAT總線與Ωm-N1驅(qū)動連接,驅(qū)動下分別帶有Delta機器人的1、2、3、4軸。一鍵剛性調(diào)整功能,能夠簡單快速完成系統(tǒng)響應(yīng)性的調(diào)試,減少客戶的調(diào)試時間。通過驅(qū)動的3倍過載能力和硬件電流環(huán)響應(yīng),能夠保證在標準的門字形測試動作下節(jié)拍達到200次/分。出色的整定算法能夠有效減少機械本體在高速運行中產(chǎn)生的抖動。
辛格林納Ωm-N1產(chǎn)品借助其出色功率密度,對比同等功率的伺服,安裝體積能夠縮減30%左右,采用穿墻安裝的方式,進一步提升柜內(nèi)空間并提高電柜的防護等級。
視頻
4 解決的問題
智能驅(qū)動,一鍵整定

圖4 一鍵自整定功能

圖5 自整定完成參數(shù)
如圖所示,借助Ω平臺所搭建的一鍵自整定功能,客戶能夠輕松完成自整定的操作,整定后的參數(shù)直接滿足設(shè)備使用需求,大幅縮減了現(xiàn)場使用人員的調(diào)試時間。
專治機械“帕金森”癥

圖6 軌跡整形前
圖7 軌跡整形后
通過Ω平臺出色的軌跡整形算法,在同樣的控制指令下,借助整形算法后,能夠有效減小設(shè)備運行中的電流波動。在200次以上的高速節(jié)拍運行中依舊能夠保證機械的平穩(wěn)運行,從而延長了機械本體的壽命。
多重保護,安心使用
在并聯(lián)機械高速運行的時候,由于高速運行的節(jié)拍,如果缺少優(yōu)秀的安全保護功能,在發(fā)生意外時可能會造成嚴重的撞機。Ω平臺系列伺服擁有的動態(tài)制動、垂直跌落、指令異常、防下墜等保護功能,能夠在發(fā)生意外時最大程度上保障客戶設(shè)備及人員安全,減少意外發(fā)生造成的損失。
5 方案總結(jié)
Ω平臺伺服采用標準的402協(xié)議,能夠配合市面上主流的控制系統(tǒng),包括Keba在內(nèi)的機器人控制系統(tǒng)。
體積小巧,滿足客戶定制化需求
辛格林納Ωm-N1驅(qū)動能夠完美匹配并聯(lián)機器人配置,體積小到一手掌握能夠為客戶節(jié)約電柜空間,選擇支架安裝,能進一步壓縮安裝空間,滿足客戶的定制化需求。
動態(tài)制動,避免飛車碰撞
借助動態(tài)制動功能,避免因為異常指令或動作導致系統(tǒng)不受控飛車發(fā)生碰撞。
試機無憂,節(jié)省調(diào)試時間
匹配自識別電機,能夠免去客戶調(diào)試的煩惱,只需一個剛性參數(shù)即可滿足客戶不同的響應(yīng)需求,大幅度縮短了整定時間。




 投訴建議
投訴建議
提交

新時達G9000集成化智能電梯控制柜在森赫電梯項目中的應(yīng)用

電梯電控智能的集大成者
新時達焊接機器人SA8/1800
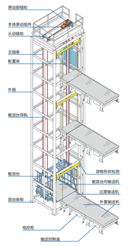
新時達S200C提升模組對往復式提升機控制技術(shù)

新時達AS720D低諧波變頻器四美皆具