


超級模型加持,3D視覺引導(dǎo)拆碼垛解決方案正助力各行業(yè)實(shí)現(xiàn)高效柔性生產(chǎn)
近年來,隨著工業(yè)自動化與物流技術(shù)的不斷發(fā)展,如何使用自動化設(shè)備提高物流效率,減少人工重復(fù)勞動,成為行業(yè)內(nèi)備受關(guān)注的議題。
在拆碼垛應(yīng)用中,由于作業(yè)強(qiáng)度大,工作內(nèi)容單一,人工作業(yè)存在效率低、錯(cuò)誤率高,成本高招工難等問題。而傳統(tǒng)的自動化拆碼垛系統(tǒng)對搬運(yùn)對象有著嚴(yán)苛的要求,如要求來料位置固定、貨物規(guī)則碼放且尺寸單一,大大限制了自動化應(yīng)用的范圍。
在實(shí)際的應(yīng)用環(huán)境中,不同場景之間存在較大差異,貨物規(guī)格種類豐富且更新頻繁,加之上下游工序中的自動化運(yùn)輸?shù)拳h(huán)節(jié),來料位置和貨物垛型存在一定偏差。

針對以上應(yīng)用痛點(diǎn),海康機(jī)器人基于機(jī)器視覺引導(dǎo)技術(shù)推出了3D視覺引導(dǎo)機(jī)械臂拆碼垛解決方案,系統(tǒng)內(nèi)置了基于大數(shù)據(jù)庫預(yù)訓(xùn)練的超級模型,輕松識別多品規(guī)的貨物,同時(shí)可獲取貨物的深度信息,靈活應(yīng)對來料偏差等情況,引導(dǎo)機(jī)械臂準(zhǔn)確抓取貨物,支持混合拆垛、一拍多抓、偏置抓取等多種抓取策略,幫助用戶提高生產(chǎn)效率,實(shí)現(xiàn)智能自動化。

視覺引導(dǎo)料筐拆垛
方案 相機(jī):MV-DLS1400P激光振鏡立體相機(jī)
構(gòu)成 軟件:RobotPilot機(jī)器人視覺引導(dǎo)平臺
01 3D視覺引導(dǎo)料筐拆垛 | 某汽車主機(jī)廠
需求背景
該主機(jī)廠內(nèi)有大量料筐需要搬運(yùn),垛型各異,且料筐為塑料材質(zhì),料筐壁之間緊密貼合,難以分割及抓取。
方案優(yōu)勢
- 點(diǎn)云成像完整,精準(zhǔn)識別料筐輪廓
- 拖拽式抓取策略,有效應(yīng)對料筐壁緊密貼合的情況
- 大視野、大景深相機(jī),輕松覆蓋多層料筐垛型
02 3D視覺引導(dǎo)料筐拆垛 | 某大型乳制品廠
需求背景
該乳制品廠內(nèi)料筐長期使用,料筐邊緣薄、顏色深淺不一,且料筐內(nèi)放滿玻璃空瓶,對成像造成較大影響。

方案優(yōu)勢
- 對極薄且有磨損的料筐依然清晰成像,點(diǎn)云輪廓完整
- 內(nèi)置高魯棒性的圖像算法,有效抑制筐內(nèi)反光物體的影響
- 大視野、大景深相機(jī),輕松覆蓋多層料筐垛型
- 極大提升現(xiàn)場搬運(yùn)效率
視覺引導(dǎo)紙箱拆碼垛
方案 相機(jī):MV-DB1300A雙目散斑結(jié)構(gòu)光立體相機(jī)
構(gòu)成 軟件:RobotPilot機(jī)器人視覺引導(dǎo)平臺
01 3D視覺引導(dǎo)多SKU紙箱混拆 | 某3C電子廠
需求背景
該生產(chǎn)車間成品出庫環(huán)節(jié),存在大量不同規(guī)格的紙箱,人工搬運(yùn)勞動強(qiáng)度大且效率低下,傳統(tǒng)機(jī)械抓取方式難以適應(yīng)混合垛型。
方案優(yōu)勢
- 支持多SKU混合拆垛
- 支持規(guī)劃吸盤偏置,實(shí)現(xiàn)單一吸盤應(yīng)對不同大小的箱體
- 支持AMR、傳輸線、讀碼系統(tǒng)、貼標(biāo)機(jī)等物流設(shè)備無縫對接
- 視覺識別耗時(shí)≤2s,效率大幅提高
- 快速適應(yīng)新品類紙箱,輕松維護(hù)
02 3D視覺引導(dǎo)紙箱碼垛 | 某大型衛(wèi)浴廠
需求背景
在衛(wèi)浴企業(yè)成品下料環(huán)節(jié),貨物重量大,品類多且頻繁新增,需要進(jìn)行高效貨品碼垛,并要求系統(tǒng)可以適應(yīng)突發(fā)狀況。
方案優(yōu)勢
- 3D相機(jī)識別線尾來料箱型,自動規(guī)劃合理垛型
- 支持人工編輯垛型,可靈活處理現(xiàn)場需求
- 支持快速復(fù)碼,輕松應(yīng)對異常斷電等情況,保障生產(chǎn)效率
03 3D視覺引導(dǎo)紙箱拆垛 | 某大型食品廠
需求背景
該企業(yè)成品包裝需要大量紙板包材,人工搬運(yùn)重量大、效率低。
方案優(yōu)勢
- 內(nèi)置的超級模型快速識別包材并引導(dǎo)機(jī)械裝置抓取
- 超大視野,輕松覆蓋大尺寸紙板包材垛型
- 視覺系統(tǒng)適配桁架機(jī)器人系統(tǒng),輕松協(xié)作
- 大幅提升了現(xiàn)場的搬運(yùn)效率
視覺引導(dǎo)麻包袋拆垛
方案 相機(jī):MV-DB1300A雙目散斑結(jié)構(gòu)光立體相機(jī)
構(gòu)成 軟件:RobotPilot機(jī)器人視覺引導(dǎo)平臺
01 3D視覺引導(dǎo)麻包袋拆垛 | 某大型塑制品廠
需求背景
該車間注塑區(qū)需要對塑料米進(jìn)行拆垛破包,人工不宜長期接觸化學(xué)材料,且搬運(yùn)強(qiáng)度大,生產(chǎn)效率較低。
方案優(yōu)勢
- 白色輕反光的麻包袋表面仍可清晰成像
- 智能規(guī)劃拆垛順序,避免撞包、擠壓等情況
- 輕松應(yīng)對垛型在運(yùn)輸過程中產(chǎn)生的垛型變化
- 拆垛破包后機(jī)械臂進(jìn)行抖料,最大程度減少原料浪費(fèi)
- 7*24小時(shí)全流程自動化,無需人工干預(yù)
02 3D視覺引導(dǎo)麻包袋拆垛 | 某大型廚具廠
需求背景
該車間有大量塑制品原材料需要搬運(yùn)破包,人工搬運(yùn)勞動強(qiáng)度大、效率低,招工困難。
方案優(yōu)勢
- 靈活應(yīng)對麻包袋在運(yùn)輸過程中出現(xiàn)的垛型變化、擠壓、變形等情況
- 破包后機(jī)械臂進(jìn)行抖料,減少原料浪費(fèi)
- 系統(tǒng)將破包后的麻包袋整齊放至回收處
- 7*24小時(shí)全流程自動化,無需人工干預(yù)
03 3D視覺引導(dǎo)麻包袋拆垛 | 某大型面粉廠
需求背景
該車間原為人工作業(yè),生產(chǎn)環(huán)境中有粉塵,人工搬運(yùn)勞動強(qiáng)度大,生產(chǎn)效率低下。
方案優(yōu)勢
- “一拖二“布局,單系統(tǒng)覆蓋兩個(gè)麻包袋垛位,降本增效
- 快速精準(zhǔn)識別麻包袋,輕松應(yīng)對垛型變形、位置偏差等情況
- 麻包袋破包后機(jī)械臂進(jìn)行抖料和廢棄包袋回收,減少浪費(fèi)
目前,海康機(jī)器人3D視覺引導(dǎo)拆碼垛解決方案已經(jīng)廣泛用于麻包袋拆垛、紙箱拆垛/碼垛、料筐拆垛、機(jī)器人供包等應(yīng)用場景中,覆蓋物流、汽車、化工、食品飲料、3C電子、醫(yī)藥等眾多行業(yè),為各行各業(yè)的用戶提供穩(wěn)定可靠、靈活部署的智能自動化生產(chǎn)解決方案。





 投訴建議
投訴建議
提交

光伏應(yīng)用 | 看3D視覺如何搞定無序/有序抓取
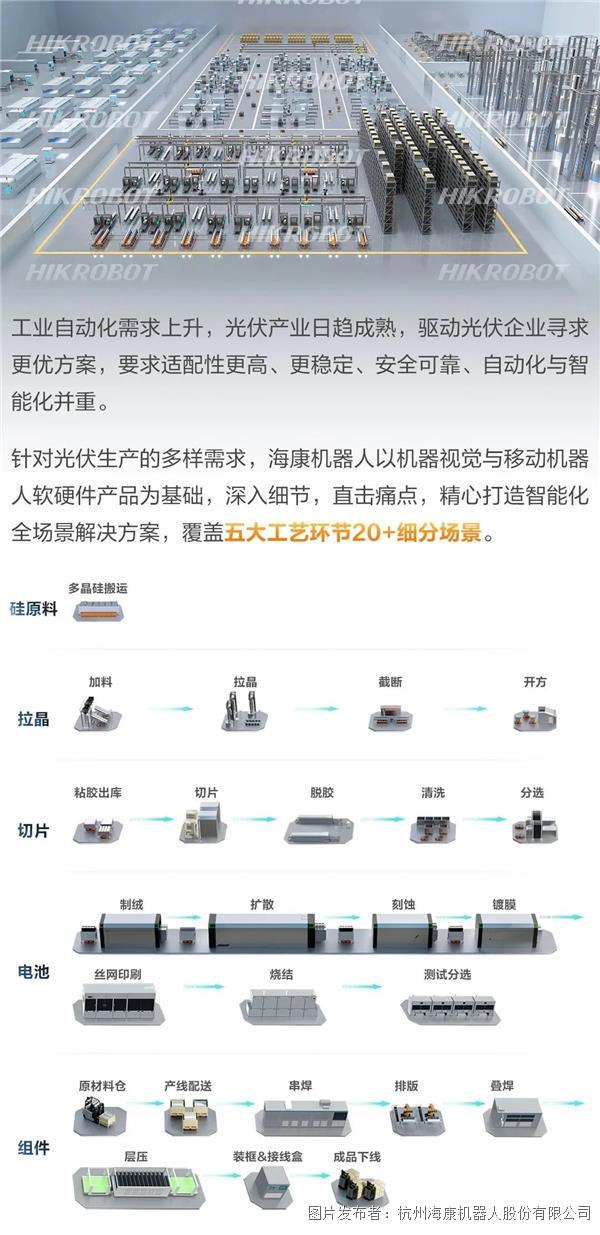
SNEC光伏展 | 直擊“五大工藝環(huán)節(jié)20+細(xì)分場景”的智造力

邀請函 | 全場景智造方案,即將亮相SNEC光伏展
光伏全場景智造,會帶來什么?

邀請函 | 全場景智造方案,即將亮相SNEC光伏展