運(yùn)動(dòng)控制器多工位位置比較輸出在轉(zhuǎn)盤(pán)式視覺(jué)篩選設(shè)備中的應(yīng)用



運(yùn)動(dòng)控制器多工位位置比較輸出在轉(zhuǎn)盤(pán)式視覺(jué)篩選設(shè)備中的應(yīng)用
本文通過(guò)ZMC430N運(yùn)動(dòng)控制器在轉(zhuǎn)盤(pán)式視覺(jué)篩選設(shè)備中的方案應(yīng)用,來(lái)深入了解正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器配合機(jī)器視覺(jué)進(jìn)行視覺(jué)飛拍、PSO高速硬件位置比較輸出等功能的應(yīng)用優(yōu)勢(shì)。
一.應(yīng)用背景
隨著工業(yè)4.0時(shí)代的推進(jìn),各大制造型企業(yè)為推動(dòng)制造業(yè),以“智能制造”賦能高質(zhì)量發(fā)展,對(duì)產(chǎn)品的品質(zhì)、產(chǎn)能等提出了更高的標(biāo)準(zhǔn)。
1、市場(chǎng)面臨的機(jī)遇與挑戰(zhàn)
在生產(chǎn)過(guò)程中,時(shí)常因生產(chǎn)和運(yùn)輸環(huán)境中的不可控因素,易導(dǎo)致產(chǎn)品出現(xiàn)外觀劃痕、壓傷、尺寸不一致等問(wèn)題。
傳統(tǒng)檢測(cè)方案一般是采用人工檢測(cè),因人工檢測(cè)易受主觀因素的影響,而導(dǎo)致檢測(cè)精度、效率、一致性不高等問(wèn)題,直接影響產(chǎn)品品質(zhì)和產(chǎn)能。
同時(shí)制造型企業(yè)也面臨招人難、用人成本高等各因素驅(qū)動(dòng)下,迫切希望將人工檢測(cè)轉(zhuǎn)向視覺(jué)智能化檢測(cè),提高產(chǎn)品品質(zhì)和產(chǎn)能,進(jìn)而增大了自動(dòng)光學(xué)檢測(cè)設(shè)備的市場(chǎng)需求。
2、開(kāi)發(fā)更好的解決方案
隨著智能制造市場(chǎng)需求的增長(zhǎng),正運(yùn)動(dòng)技術(shù)也為此推廣部署致力于解決各領(lǐng)域制造型企業(yè)面臨的主要挑戰(zhàn)。
例如ZMC430N運(yùn)動(dòng)控制器應(yīng)用在轉(zhuǎn)盤(pán)式視覺(jué)篩選機(jī)上的解決方案,已被廣泛應(yīng)用,它能快速有效地為客戶(hù)解決傳統(tǒng)檢測(cè)方案在品質(zhì)方面存在的隱患,毅然成為制造業(yè)為確保產(chǎn)品品質(zhì)的核心智能過(guò)程控制利器。

3、方案應(yīng)用效果
轉(zhuǎn)盤(pán)式視覺(jué)篩選機(jī),是針對(duì)各種零件的尺寸、外觀等缺陷而研發(fā)的自動(dòng)化檢測(cè)設(shè)備,采用振動(dòng)盤(pán)等上料機(jī)構(gòu)自動(dòng)輸送零件到玻璃轉(zhuǎn)盤(pán)后,視覺(jué)檢測(cè)工位對(duì)零件進(jìn)行圖像處理。
運(yùn)動(dòng)控制器則完成玻璃轉(zhuǎn)盤(pán)的恒速旋轉(zhuǎn)以及物料位置的編碼器反饋、硬件位置比較輸出對(duì)多工位的CCD相機(jī)和吹氣裝置進(jìn)行控制,實(shí)現(xiàn)全自動(dòng)多面外觀、尺寸等方面的檢測(cè)篩選。
4、應(yīng)用市場(chǎng)
轉(zhuǎn)盤(pán)式視覺(jué)篩選機(jī)廣泛應(yīng)用于3C電子、鋰電池、電子元器件、半導(dǎo)體、五金等工業(yè)制造領(lǐng)域。
二.ZMC430N運(yùn)動(dòng)控制器介紹
ZMC430N是一款高性能30軸EtherCAT、RTEX雙總線(xiàn)+脈沖運(yùn)動(dòng)控制器。可實(shí)現(xiàn)直線(xiàn)插補(bǔ)、圓弧插補(bǔ)、連續(xù)軌跡加工等復(fù)雜的運(yùn)動(dòng)控制功能,支持IO高速鎖存輸入/精準(zhǔn)輸出和位置同步輸出PSO,非常適用于2-8個(gè)視覺(jué)檢測(cè)工位的轉(zhuǎn)盤(pán)式視覺(jué)篩選設(shè)備上。
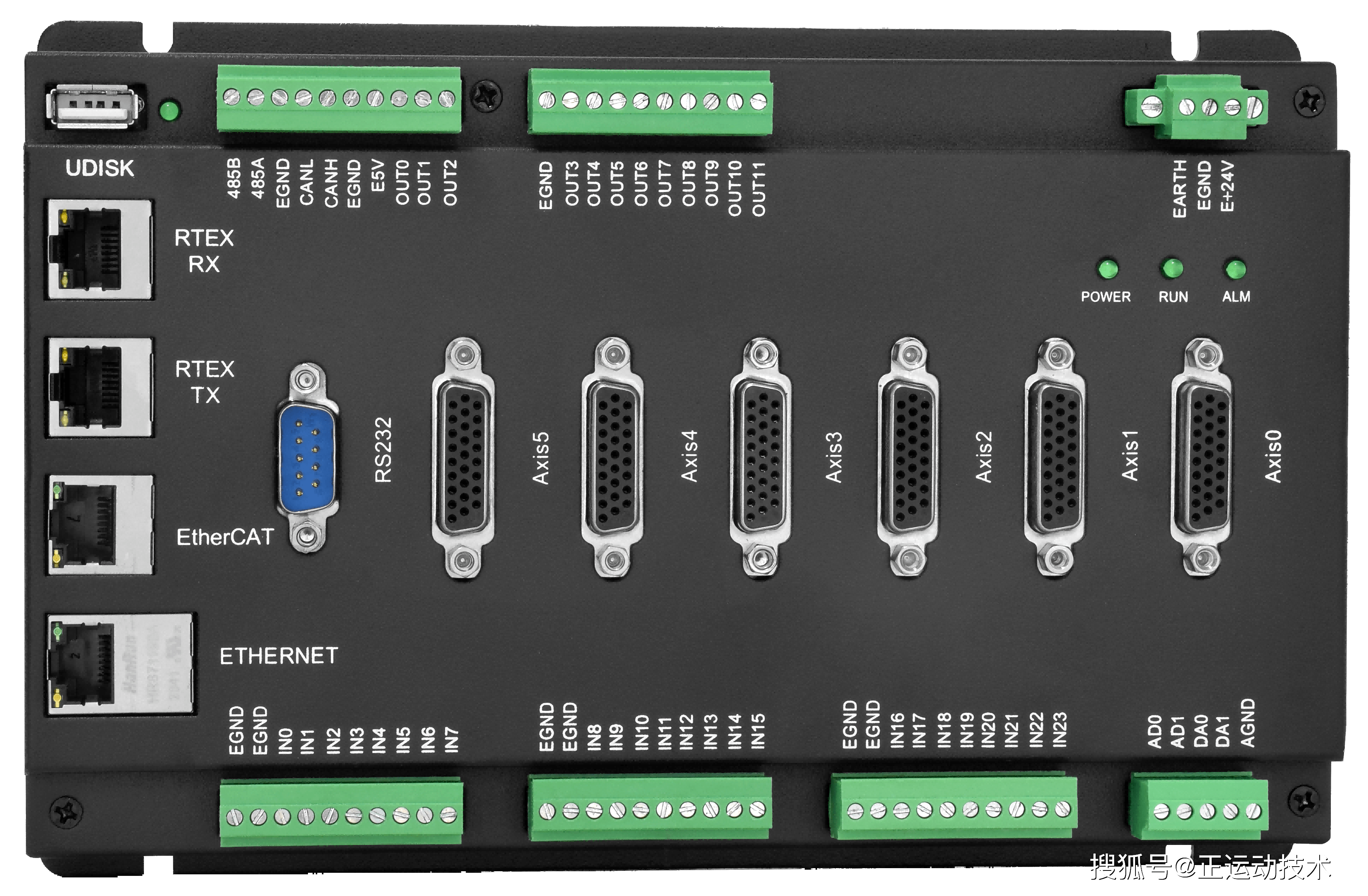
1、ZMC430N運(yùn)動(dòng)控制器的性能:
最大輸出脈沖頻率可達(dá)10MHz;
16軸以?xún)?nèi)EtherCAT最快刷新周期100μs;
EtherCAT/RTEX多總線(xiàn)軸+脈沖軸混合插補(bǔ)。
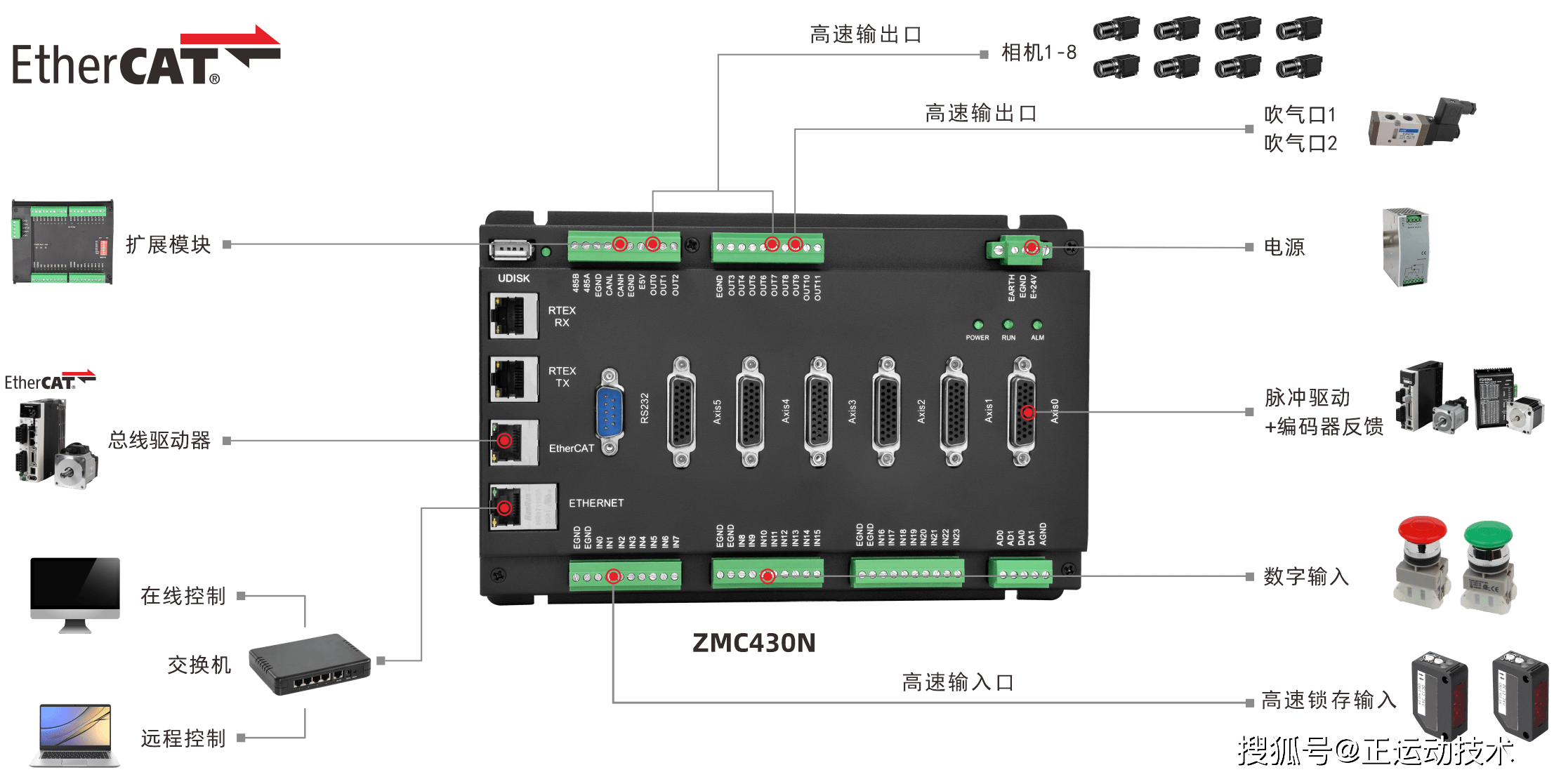
2、控制器在轉(zhuǎn)盤(pán)視覺(jué)篩選機(jī)上的應(yīng)用優(yōu)勢(shì):
可實(shí)時(shí)控制轉(zhuǎn)盤(pán),記錄編碼器的反饋位置;
高速輸入口接傳感器,感應(yīng)并記錄零件來(lái)料位置;
PSO硬件位置比較輸出可接2-8個(gè)相機(jī)進(jìn)行視覺(jué)飛拍、檢測(cè)和測(cè)量;
PSO硬件位置比較輸出可接吹氣口,對(duì)視覺(jué)的檢測(cè)結(jié)果進(jìn)行相應(yīng)篩選分類(lèi)。
 控制器基于轉(zhuǎn)盤(pán)視覺(jué)篩選功能的實(shí)現(xiàn)原理圖
控制器基于轉(zhuǎn)盤(pán)視覺(jué)篩選功能的實(shí)現(xiàn)原理圖
3、控制器支持多種高級(jí)編程
調(diào)用同一套API函數(shù)庫(kù)即可開(kāi)發(fā)多種運(yùn)動(dòng)控制需求。
 玻璃轉(zhuǎn)盤(pán)視覺(jué)篩選機(jī)原理
玻璃轉(zhuǎn)盤(pán)視覺(jué)篩選機(jī)原理
三.玻璃轉(zhuǎn)盤(pán)視覺(jué)篩選機(jī)原理
1、工作原理
首先通過(guò)振動(dòng)盤(pán)將零件輸送到高透明玻璃轉(zhuǎn)臺(tái),其次通過(guò)傳感器去感應(yīng)來(lái)料的零件,再通過(guò)ZMC430N的高速鎖存輸入口記錄來(lái)料的實(shí)際位置。
當(dāng)轉(zhuǎn)盤(pán)轉(zhuǎn)動(dòng)到視覺(jué)檢測(cè)工位時(shí),控制器通過(guò)高速輸出口觸發(fā)相機(jī)拍照,然后進(jìn)行圖像處理運(yùn)算,最后根據(jù)預(yù)設(shè)的檢測(cè)標(biāo)準(zhǔn)進(jìn)行自動(dòng)檢測(cè)篩選,并剔除不良品。
 轉(zhuǎn)盤(pán)式視覺(jué)篩選示意圖
轉(zhuǎn)盤(pán)式視覺(jué)篩選示意圖
2、運(yùn)動(dòng)控制系統(tǒng)原理
基于ZMC430N運(yùn)動(dòng)控制器的轉(zhuǎn)盤(pán)式視覺(jué)篩選系統(tǒng),相比于傳統(tǒng)的PLC+觸摸屏方案,系統(tǒng)集成度、響應(yīng)速度和效率更高。
在玻璃轉(zhuǎn)盤(pán)飛速運(yùn)動(dòng)的時(shí),通過(guò)硬件觸發(fā)相機(jī)進(jìn)行視覺(jué)飛拍拍攝物料進(jìn)行圖像處理,并實(shí)時(shí)輸出對(duì)應(yīng)的篩選分類(lèi)結(jié)果,檢測(cè)速度可大幅度提升。
運(yùn)動(dòng)控制器基于轉(zhuǎn)盤(pán)式視覺(jué)篩選設(shè)備的硬件方案
3、視覺(jué)系統(tǒng)原理
根據(jù)轉(zhuǎn)盤(pán)的旋轉(zhuǎn)運(yùn)動(dòng)速度要求,需對(duì)相機(jī)的拍照響應(yīng)、曝光時(shí)間和像素,以及光源控制方式等都有一定的要求,才能根據(jù)運(yùn)動(dòng)速度去完成不同零件的視覺(jué)飛拍、測(cè)量和檢測(cè)等功能。
四.ZMC430N運(yùn)動(dòng)控制器配合視覺(jué)在轉(zhuǎn)盤(pán)式視覺(jué)篩選設(shè)備中的應(yīng)用
1、系統(tǒng)動(dòng)作流程
1)待檢產(chǎn)品上料
根據(jù)物料的類(lèi)型,選擇相應(yīng)的振動(dòng)盤(pán)將零件輸送到高透明玻璃轉(zhuǎn)臺(tái)上,其中旋轉(zhuǎn)臺(tái)是以某一設(shè)定的速度在恒速旋轉(zhuǎn);
2)感應(yīng)物料并記錄位置
當(dāng)傳感器感應(yīng)到物料,基于FPGA的高速鎖存口記錄物料當(dāng)前位置;
3)相機(jī)觸發(fā)拍照
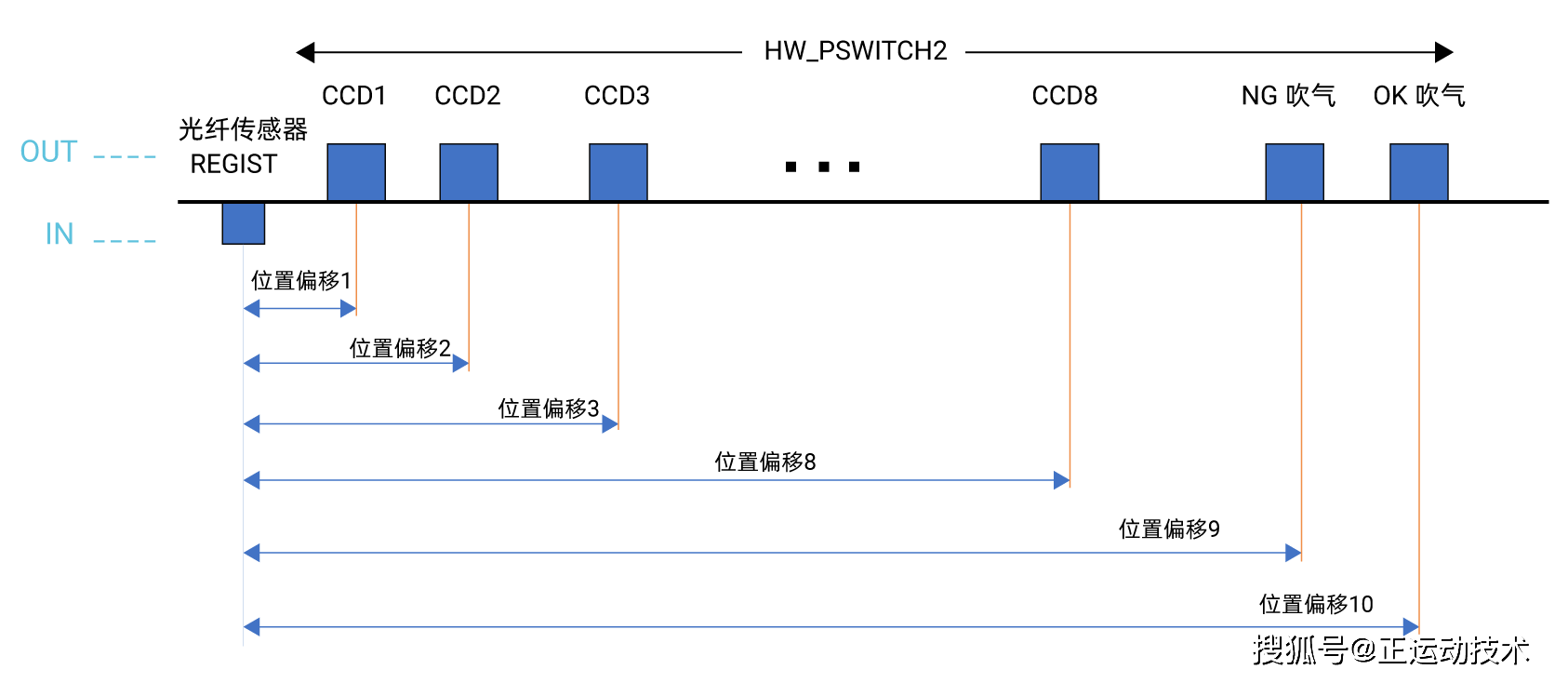
通過(guò)高速鎖存口鎖存的位置,計(jì)算出各個(gè)相機(jī)的位置,由運(yùn)動(dòng)控制器內(nèi)部硬件位置比較輸出觸發(fā)相機(jī),進(jìn)行視覺(jué)飛拍;
4)視覺(jué)系統(tǒng)處理
對(duì)拍照的物料圖片進(jìn)行視覺(jué)檢測(cè)、測(cè)量、識(shí)別等功能,并傳輸OK或者NG信號(hào)給到運(yùn)動(dòng)控制器;
5)吹氣篩選
根據(jù)視覺(jué)系統(tǒng)反饋給運(yùn)動(dòng)控制器的結(jié)果,以及通過(guò)感應(yīng)器鎖存的物料的位置計(jì)算出吹氣口的位置,由運(yùn)動(dòng)控制器內(nèi)部的硬件位置比較輸出控制吹氣口,進(jìn)行篩選良品/不良品。
2、方案優(yōu)勢(shì)
檢測(cè)結(jié)果穩(wěn)定、一致性高;
自動(dòng)篩選分類(lèi)不良品,并剔除,提高產(chǎn)品品質(zhì);
視覺(jué)飛拍相比靜態(tài)拍攝,減少機(jī)臺(tái)CT,提高效率;
一人操作一臺(tái)機(jī)器可替代2-6人工作業(yè),提高產(chǎn)能;
可在線(xiàn)監(jiān)測(cè)每道生產(chǎn)檢測(cè)工序是否在可靠、有效地進(jìn)行;
相比于傳統(tǒng)的PLC+觸摸屏方案,集成化更高,性?xún)r(jià)比更好,響應(yīng)更快,效率更高。
想要了解更多關(guān)于ZMC430N運(yùn)動(dòng)控制器在轉(zhuǎn)盤(pán)式視覺(jué)篩選設(shè)備中的應(yīng)用,請(qǐng)咨詢(xún)正運(yùn)動(dòng)技術(shù)銷(xiāo)售工程師:400-089-8936
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。 文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來(lái)源
正運(yùn)動(dòng)技術(shù)專(zhuān)注于運(yùn)動(dòng)控制技術(shù)研究和通用運(yùn)動(dòng)控制軟硬件產(chǎn)品的研發(fā),是國(guó)家級(jí)高新技術(shù)企業(yè)。正運(yùn)動(dòng)技術(shù)匯集了來(lái)自華為、中興等公司的優(yōu)秀人才,在堅(jiān)持自主創(chuàng)新的同時(shí),積極聯(lián)合各大高校協(xié)同運(yùn)動(dòng)控制基礎(chǔ)技術(shù)的研究,是國(guó)內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國(guó)內(nèi)少有、完整掌握運(yùn)動(dòng)控制核心技術(shù)和實(shí)時(shí)工控軟件平臺(tái)技術(shù)的企業(yè)。主要業(yè)務(wù)有:運(yùn)動(dòng)控制卡_運(yùn)動(dòng)控制器_EtherCAT運(yùn)動(dòng)控制卡_EtherCAT控制器_運(yùn)動(dòng)控制系統(tǒng)_視覺(jué)控制器__運(yùn)動(dòng)控制PLC_運(yùn)動(dòng)控制_機(jī)器人控制器_視覺(jué)定位等等。




 投訴建議
投訴建議
提交

正運(yùn)動(dòng)全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制器ZMC432H用戶(hù)手冊(cè)

正運(yùn)動(dòng)全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制器ZMC432H

正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器如何快速實(shí)現(xiàn)單軸/多軸同步跟隨功能?

正運(yùn)動(dòng)ECI1408運(yùn)動(dòng)控制卡用戶(hù)手冊(cè)

正運(yùn)動(dòng)機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC710