


機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)應(yīng)用例程|端子裁切檢測
一、應(yīng)用背景
端子通常是指外部導(dǎo)體連接的接線終端,它們的作用主要傳遞電信號或?qū)щ娪谩?/p>
例如,當(dāng)部件與外電路連接時(shí),需用連接器進(jìn)行連接。 它是將電子設(shè)備中內(nèi)部各電子元器件之間進(jìn)行電性連接。 連接器一般是包含兩個(gè)部分,其中一個(gè)是端子,另外一個(gè)是承載該端子的塑膠本體。
在塑膠本體注塑成型后 , 端子根據(jù)連接器所需的尺寸進(jìn)行裁切 ,之后再將裁切好的端子安裝到塑膠本體中,最終形成連接器 。 如果端子裁切不完整,就會(huì)導(dǎo)致后段工序中出現(xiàn)端子與塑膠本體之間壓制出的端子出現(xiàn)歪斜等問題。
為解決上述問題,正運(yùn)動(dòng)技術(shù)通過圖像處理技術(shù)進(jìn)行自動(dòng)檢測端子的裁切情況 ,從而替代傳統(tǒng)人工檢測 。 因人工檢測主要受主觀因素的影響,容易導(dǎo)致檢測精度、 效率不高等問題,在很大程度上直接影響了產(chǎn)品的出品質(zhì)量。
通過機(jī)器視覺來檢測端子的裁切情況,可以很好地解決傳統(tǒng)方案中檢測精度和效率不高問題。
上期課程,我們講述了在機(jī)器視覺方案中3C電子屏幕裂痕檢測的應(yīng)用案例,本期課程我們將和大家一起分享如何去實(shí)現(xiàn)端子裁切檢測的應(yīng)用。
教學(xué)視頻
二、檢測原理
(一)檢測需求
1.檢測端子有無裁切
2. 主界面顯示端子裁切檢測結(jié)果和統(tǒng)計(jì)今日生產(chǎn)的良品數(shù)據(jù)
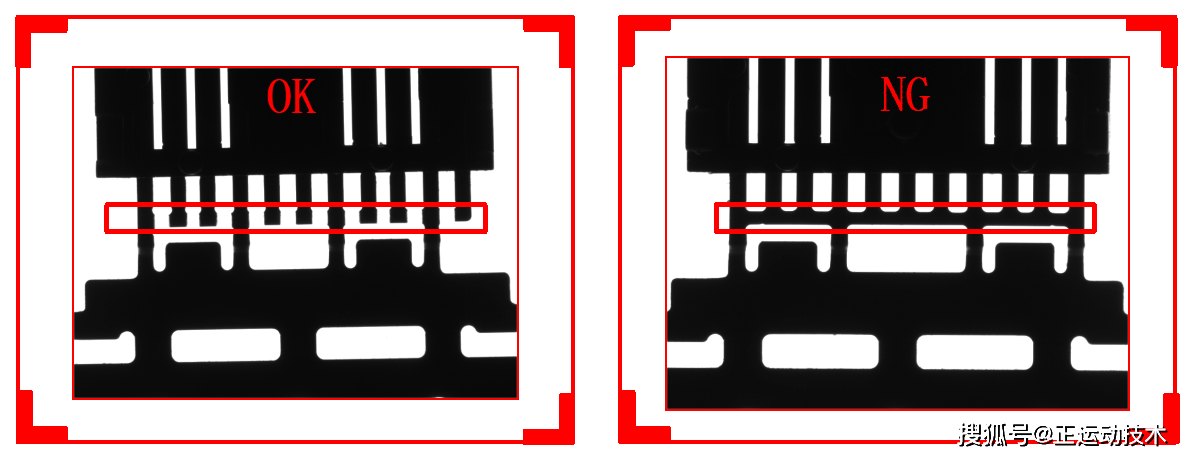 樣品圖
樣品圖
(二)軟件算法
1.先使用模板設(shè)置創(chuàng)建端子裁剪的形狀模板,接著進(jìn)行多個(gè)端子匹配,并獲取結(jié)果矩陣信息,之后去獲取多個(gè)端子的模板輪廓。
2.計(jì)算多個(gè)端子的模板輪廓重心位置坐標(biāo),接著根據(jù)獲取的重心位置進(jìn)行向量補(bǔ)正。并將補(bǔ)正后的結(jié)果位置作為繪制多個(gè)矩形ROI框檢測區(qū)域的索引位置,用于去檢測多個(gè)端子裁剪目標(biāo)位置上的端子有無裁剪成功。
3.最后將端子裁切的檢測結(jié)果和統(tǒng)計(jì)今日生產(chǎn)的良品數(shù)量顯示在主界面上。
(三)課前準(zhǔn)備
1.電腦一臺,安裝ZDevelop3.10.07版本軟件
2.VPLC516E一臺
3.24V直流電源一個(gè)
4.網(wǎng)線若干
5.電線若干
三、軟件實(shí)現(xiàn)
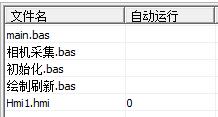
1. 打開ZDevelop軟件:新建名稱為“端子裁切檢測.zpj”項(xiàng)目→新建“HMI”文件→新建“main.bas”文件 (用于編寫界面響應(yīng)函數(shù)) →新建“初始化.bas”文件 (用于初始化參數(shù)) →新建“相機(jī)采集.bas”文件 (用于實(shí)現(xiàn)圖像采集功能) →“繪制刷新.bas”文件 (用于更新繪制ROI數(shù)據(jù)) →文件添加到項(xiàng)目。
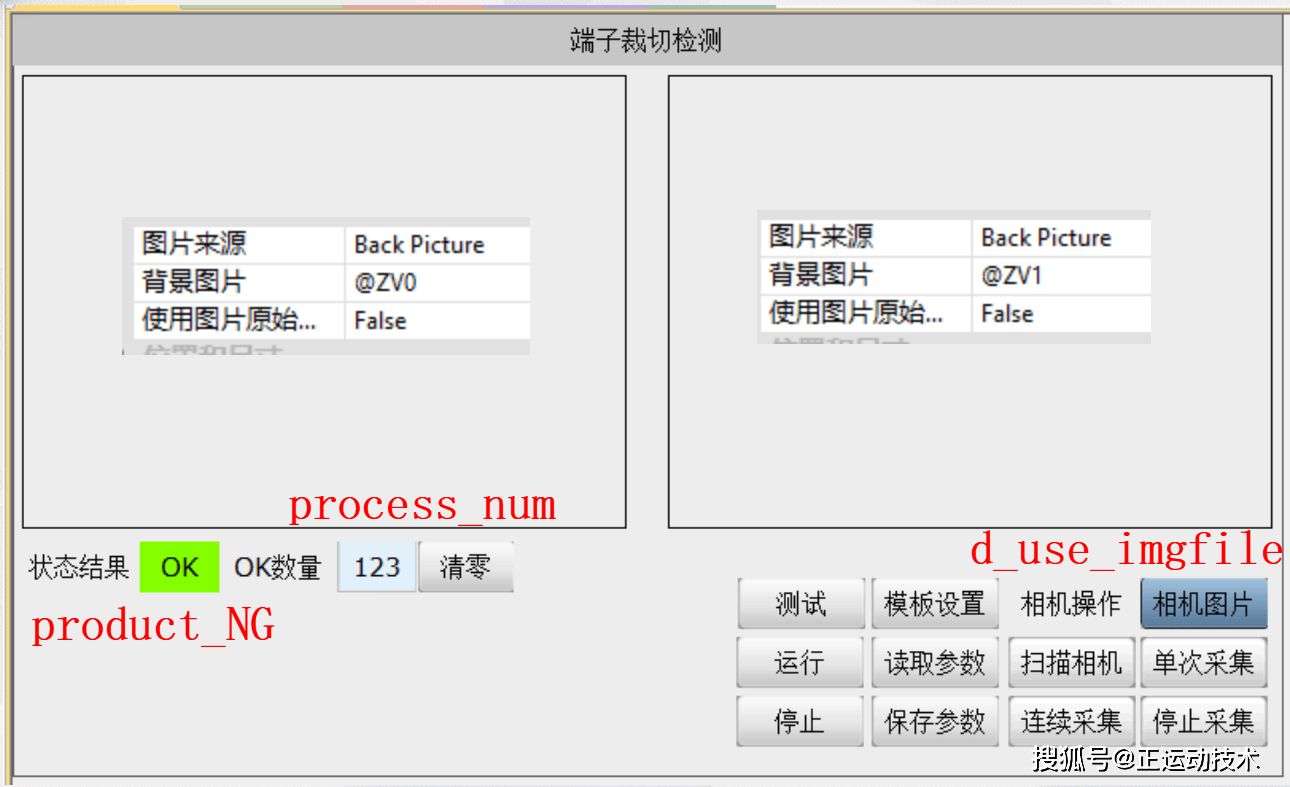
2.設(shè)計(jì)HMI界面。

3.關(guān)聯(lián)HMI界面控件變量。
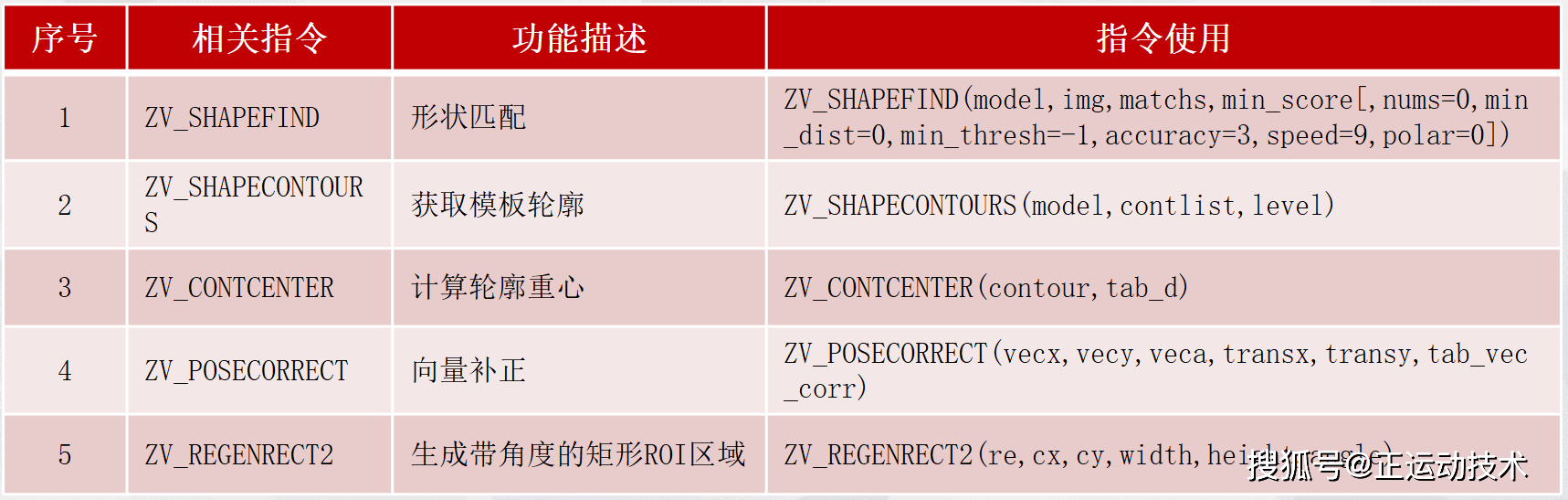
4. 本期課程代碼主要實(shí)現(xiàn)的功能使用到的指令如下。
四、操作演示
(一)操作步驟
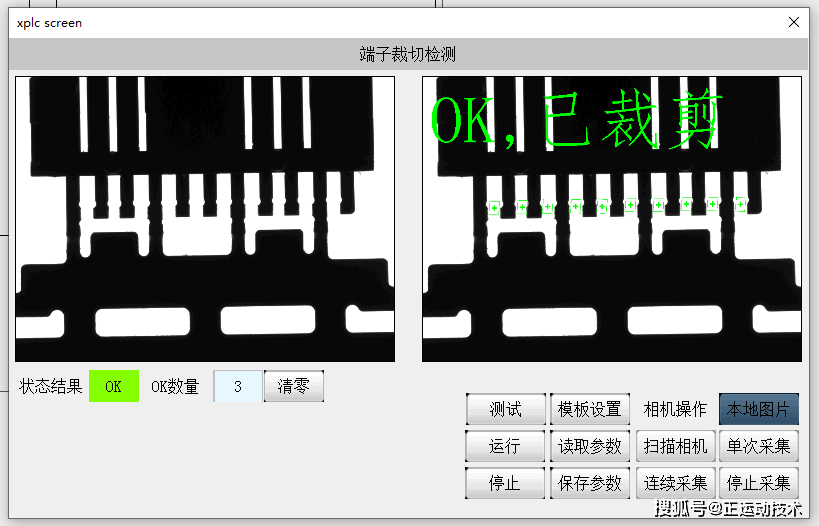
查看運(yùn)行效果:將項(xiàng)目下載到控制器中→使用本地圖片→單次采集→模板設(shè)置(創(chuàng)建端子裁剪的形狀模板)→點(diǎn)擊測試(查看端子裁剪檢測結(jié)果)→點(diǎn)擊運(yùn)行(查看連續(xù)運(yùn)行效果)→結(jié)束。
(二)效果演示
本次,正運(yùn)動(dòng)技術(shù)機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)應(yīng)用例程|端子裁切檢測,就分享到這里。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。




 投訴建議
投訴建議
提交

正運(yùn)動(dòng)全國產(chǎn)EtherCAT運(yùn)動(dòng)控制器ZMC432H用戶手冊

正運(yùn)動(dòng)全國產(chǎn)EtherCAT運(yùn)動(dòng)控制器ZMC432H

正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器如何快速實(shí)現(xiàn)單軸/多軸同步跟隨功能?

正運(yùn)動(dòng)ECI1408運(yùn)動(dòng)控制卡用戶手冊

正運(yùn)動(dòng)機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)VPLC710