


技術(shù)干貨 | 識(shí)別專欄之二維碼導(dǎo)航
識(shí)別專題二維碼導(dǎo)航
# 二維碼導(dǎo)航的使用場(chǎng)景
仙工智能的 AGV 支持多種導(dǎo)航方式,二維碼導(dǎo)航是其中一種。在狹窄的環(huán)境、環(huán)境空曠又或者是環(huán)境變化比較大的場(chǎng)景下,通過(guò)粘貼導(dǎo)航用的二維碼和安裝在 AGV 車(chē)身下的 PGV 讀頭,可以實(shí)現(xiàn)準(zhǔn)確、穩(wěn)定的定位和導(dǎo)航。PGV(Position Guided Vision):位置導(dǎo)引視覺(jué),可以用于支持二維碼導(dǎo)航或色帶導(dǎo)航
仙工智能SEER,視頻號(hào)
快速了解戳視頻,詳細(xì)內(nèi)容往下看
閱讀全文約 3 分鐘
# PGV 安裝和注意事項(xiàng)
PGV 在安裝的時(shí)候一般安裝在小車(chē)底部,且垂直照向地面,在安裝的時(shí)候,首先需要保證 PGV 的離地高度適中,保證當(dāng)二維碼處于 PGV 正下方的時(shí)候,PGV 可以完整的看到二維碼;其次需要注意 PGV 的安裝方向和安裝角度,盡量保證 PGV 水平安裝。
# 模型配置
PGV 的 yaw (r) 角,需要通過(guò)將二維碼與車(chē)子平行,從 PGV 中讀取 angle 角,然后 PGV 配置中的 yaw 即為 -angle。
正確填寫(xiě) yaw 值后,執(zhí)行 pgv 標(biāo)定,在標(biāo)定完之后可以看到如下圖所示的參數(shù)列表,單位 xUnit、yUnit 為 pgv 配置的坐標(biāo)值,按照實(shí)際配置填寫(xiě);本文檔配置坐標(biāo)單位為 0.1mm,所以填寫(xiě) 0.0001m。

"func" 是指位置引導(dǎo)視覺(jué)系統(tǒng)的功能,請(qǐng)根據(jù)實(shí)際情況進(jìn)行勾選。
adjust:調(diào)整;
localization:定位;
adjustLocalization:定位+到點(diǎn)角度調(diào)整。

配置完成后可在【運(yùn)行狀態(tài)】-【PGV】一欄看到讀碼信息:

# PGV 的標(biāo)定
仙工智能提供兩種 PGV 標(biāo)定方式
PGV 標(biāo)定和 PGV -里程計(jì)標(biāo)定

1、PGV 標(biāo)定:
PGV 標(biāo)定適用于安裝有 PGV(上視或下視均可)設(shè)備的車(chē)輛,每個(gè) PGV 設(shè)備都對(duì)應(yīng)一個(gè)此類(lèi)型的標(biāo)定項(xiàng)。
PGV 標(biāo)定需要采集:PGV 檢測(cè)到的二維碼位姿數(shù)據(jù)和里程計(jì)輸出。使機(jī)器人在初始狀態(tài)下能用待標(biāo)定的 PGV 檢測(cè)到二維碼,機(jī)器人將執(zhí)行如下動(dòng)作:調(diào)整機(jī)器人位姿,使 PGV 對(duì)齊到二維碼中心;前進(jìn)-后退若干次;圍繞(模型文件所描述的)PGV 中心旋轉(zhuǎn)一周。
2、PGV-里程計(jì)標(biāo)定:
PGV-里程計(jì)標(biāo)定適用于未裝備勾選了用于定位的激光雷達(dá)設(shè)備,同時(shí)裝備了下視 PGV 的雙輪差動(dòng)車(chē)(這樣的車(chē)輛始終依靠檢測(cè)二維碼進(jìn)行定位)。每個(gè)下視 PGV 都對(duì)應(yīng)一個(gè)該類(lèi)型的標(biāo)定項(xiàng)。PGV-里程計(jì)標(biāo)定需要采集:源自 PGV 的車(chē)輛定位數(shù)據(jù)和行走電機(jī)編碼器數(shù)據(jù)。鑒于 PGV-里程計(jì)標(biāo)定過(guò)程中,需要盡可能多地獲取源自 PGV 檢測(cè)到的二維碼位姿信息的定位數(shù)據(jù),因此需要一個(gè)二維碼密集的區(qū)域進(jìn)行標(biāo)定。該區(qū)域最簡(jiǎn)單的形式為一個(gè)連續(xù)的條狀二維碼區(qū)域,如下圖所示:

此條狀二維碼區(qū)域同時(shí)還具有如下屬性(參見(jiàn)下圖)
二維碼坐標(biāo)系的 x 軸對(duì)應(yīng)于條狀區(qū)域的長(zhǎng)邊;二維碼區(qū)域中,二維碼坐標(biāo)系下 x負(fù)方向那一端的二維碼稱為起始二維碼,開(kāi)始執(zhí)行 PGV-里程計(jì)標(biāo)定時(shí)機(jī)器人應(yīng)位于 PGV 可檢測(cè)到此二維碼的范圍內(nèi)。

使機(jī)器人在初始狀態(tài)下能用待標(biāo)定的 PGV 檢測(cè)到起始二維碼,開(kāi)始標(biāo)定后機(jī)器人將執(zhí)行如下動(dòng)作:調(diào)整機(jī)器人位姿,使 PGV 對(duì)齊到起始二維碼中心;前進(jìn)-后退若干次;原地逆時(shí)針-順時(shí)針旋轉(zhuǎn)若干次。
3、PGV 標(biāo)定操作說(shuō)明:
①將車(chē)輛移動(dòng)至可使 PGV 檢測(cè)到二維碼的中心位置,且使得機(jī)器人原地旋轉(zhuǎn)過(guò)程中始終能夠檢測(cè)到二維碼;
②將車(chē)頭朝向可檢測(cè)到二維碼區(qū)域的中心位置,以使得車(chē)輛能在盡可能長(zhǎng)的直行距離內(nèi)檢測(cè)到二維碼;
③勾選標(biāo)定執(zhí)行標(biāo)定,完成后設(shè)置標(biāo)定結(jié)果
注:如果與里程計(jì)相關(guān)的標(biāo)定項(xiàng)顯示為未標(biāo)定,則執(zhí)行相應(yīng)標(biāo)定并設(shè)置標(biāo)定結(jié)果;目前 PGV 的標(biāo)定要依賴激光,必須先標(biāo)定激光后才能開(kāi)始標(biāo)定機(jī)器人。
# 二維碼粘貼要求
二維碼一般粘貼在地面上,在粘貼的時(shí)候,首先要保證二維碼粘貼平整,如果粘貼不平整會(huì)導(dǎo)致 PGV 識(shí)別失敗;二維碼上面的不可以出現(xiàn)打印不清晰或者有涂抹存在,這些都會(huì)導(dǎo)致 PGV 識(shí)別失敗。在貼二維碼的時(shí)候,需要保證二維碼的朝向一致且最好要沿著一條直線粘貼。貼?維碼前先規(guī)劃好路徑、特別是互斥區(qū)。張貼前線使?墨?打線、兩條平?線需保證絕對(duì)平? (不然地圖規(guī)劃將不好操作)。貼碼時(shí)先把二維碼中間的間距記錄?便建圖。
# 二維碼建圖說(shuō)明
1、建圖在地圖邊緣??地?建圖(如圖),調(diào)整設(shè)置參數(shù)與地圖檢測(cè)參數(shù)。先建?維碼(間隔?于 ??,與實(shí)際貼碼情況?致)然后在建需要的點(diǎn)位,點(diǎn)位建在?維碼上(Roboshop Pro2.3.1.4 以上 可以直接復(fù)制坐標(biāo))。



2、確認(rèn)機(jī)器人定位:使??級(jí)區(qū)域如圖設(shè)置,將地圖框起來(lái),當(dāng)?shù)貓D中機(jī)器?模型在?級(jí)區(qū)域且掃到了?維碼機(jī)器? 將?動(dòng)找到定位。

# 二維碼導(dǎo)航設(shè)置教程
1、二維碼位置獲取:
在使用二維碼導(dǎo)航車(chē)輛之前務(wù)必保證機(jī)器人已經(jīng)配置及標(biāo)定完成;現(xiàn)場(chǎng)貼放完二維碼之后,在 Roboshop Pro 首頁(yè)選中機(jī)器人,然后在工具欄右側(cè)會(huì)出現(xiàn)開(kāi)始識(shí)別按鈕。如下圖:

點(diǎn)擊開(kāi)始識(shí)別,然后將機(jī)器人手動(dòng)控制到二維碼下方,機(jī)器人停止運(yùn)動(dòng)后會(huì)顯示二維碼的位置,然后會(huì)在地圖上繪制二維碼,依次控制到所有二維碼下方直到所有二維碼識(shí)別完,然后點(diǎn)擊停止識(shí)別,這時(shí)候?qū)?dāng)前地圖上傳,就成功記錄所有二維碼的世界坐標(biāo)位置,如下圖所示:

2、在二維碼上增加站點(diǎn):
在二維碼導(dǎo)航中,機(jī)器人通過(guò)讀取二維碼的信息確定機(jī)器人此時(shí)的位置,機(jī)器人通過(guò)地圖上站點(diǎn)(例,AP 點(diǎn))及線路來(lái)確定下一步的行進(jìn)方向;在地圖編輯模式,首選從左側(cè)工具欄選擇站點(diǎn)(例,AP),在靠近二維碼的的任意位置落下,然后再拖動(dòng)此 AP 點(diǎn),當(dāng) AP 點(diǎn)靠近二維碼時(shí),AP 點(diǎn)會(huì)自動(dòng)吸附至二維碼上,如下圖所示:

按照此步驟將所有二維碼上均吸附上 AP 點(diǎn),并規(guī)劃路線,如下圖所示;

注意:地圖上二維碼的朝向一定要與實(shí)際地面上二維碼的朝向一致;AP 點(diǎn)的方向可以根據(jù) .smap 的實(shí)際需要進(jìn)行調(diào)整;
3、二維碼區(qū)域定位:
接下來(lái)選擇需要使用二維碼導(dǎo)航的區(qū)域,在地圖編輯中,選擇區(qū)域 ≥ 高級(jí)區(qū)域中選擇二維碼區(qū)域,覆蓋在需要二維碼導(dǎo)航的區(qū)域,如下圖所示:

該區(qū)域配置完成后保存推送,然后機(jī)器人運(yùn)行到該區(qū)域后自動(dòng)切換為二維碼定位,離開(kāi)該區(qū)域后自動(dòng)切換為激光定位;
4、二維碼導(dǎo)航注意事項(xiàng):
①TagArea 區(qū)域務(wù)必覆蓋所有需要二維碼導(dǎo)航的站點(diǎn)及線路;
②在 .smap 上保證二維碼的編號(hào)與現(xiàn)實(shí)位置一一對(duì)應(yīng)。③貼二維碼間隔一般要求在1m以內(nèi),(碼和碼之間走的是開(kāi)環(huán)運(yùn)動(dòng),理論上間距越小則到點(diǎn)精 度越準(zhǔn)另外貼碼間距小的情況下AP站點(diǎn)可以不建立在二維碼上但到點(diǎn)精度也會(huì)有稍許影響)。 ④二維碼盡量要貼在一條直線上,如果貼歪可能會(huì)導(dǎo)致到點(diǎn)精度差和到此點(diǎn)后機(jī)器人減速。
⑤注意二維碼都有獨(dú)立的編號(hào),使用的二維碼不要有同號(hào)的,掃描后面一個(gè)二維碼時(shí)會(huì)覆蓋前 面的二維碼。
# 相關(guān)參數(shù)說(shuō)明
在機(jī)器人模型PGV配置界面,需要配置一些參數(shù),下面對(duì)這些參數(shù)做出說(shuō)明:
首先是basic下的:
onOpenTime:pgv 開(kāi)機(jī)時(shí)間,配置 pgv 開(kāi)機(jī)時(shí)間;
id:設(shè)備 id,位置引導(dǎo)視覺(jué)系統(tǒng)的編號(hào);
x:在 x 軸位置,右手坐標(biāo)系下的 x 位置,如小車(chē)模型中坐標(biāo);
y:在 y 軸位置,右手坐標(biāo)系下的 y 位置,如小車(chē)模型中坐標(biāo);
z:在 z 軸位置,右手坐標(biāo)系下的 z 位置,鏡頭到二維碼距離;
yaw:安裝角度,右手坐標(biāo)系下朝向角,如小車(chē)模型中坐標(biāo)(不清楚 PGV 朝向時(shí),可將二維碼 x 方向與車(chē)體 x 方向?qū)R,并使其位于 PGV 視野中,讀取此時(shí) PGV 返回的角度(為弧度制,注意轉(zhuǎn)換),取相反數(shù)填入模型文件);
upside:是否正裝,所配置位置引導(dǎo)視覺(jué)系統(tǒng)的安裝位置是否為正裝,若正裝則勾選該項(xiàng),反裝則不勾選;
xUnit:x 單位,PGV 返回 X 數(shù)值單位,換算為 m 需要乘的系數(shù);可通過(guò)查看 PGV 使用說(shuō)明書(shū)方式獲得;
xRange:X 方向范圍,PGV 能看到的 X 方向的范圍,單位為 m,請(qǐng)根據(jù)實(shí)際情況進(jìn)行填寫(xiě);
yUnit:y單位,PGV 返回 Y 數(shù)值單位,換算為 m 需要乘的系數(shù);可通過(guò)查看 PGV 使用說(shuō)明書(shū)方式獲得;
yRange:Y 方向范圍,PGV 能看到的 Y 方向的范圍,單位為 m,請(qǐng)根據(jù)實(shí)際情況進(jìn)行填寫(xiě);
angleUnit:角度單位,PGV 返回角度信息的單位,換算為"°"時(shí)的單位;
然后是 func 下面的參數(shù):
adjust:調(diào)整,AGV 到達(dá)目標(biāo)點(diǎn),會(huì)根據(jù)二維碼的位置做調(diào)整;
localization:定位;
adjustLocalization:調(diào)整加定位;
最后是 brand 下面的參數(shù):
P+F-R4-485:品牌名稱,已適配可選用品牌;
MS-PGV-485:品牌名稱,已適配可選用品牌;
# 相關(guān)報(bào)警及 FAQ
"55503": "rbk_pgv_loc is not activated",pgv 沒(méi)有啟用;
"54070": "PGV cannot find codes",pgv 沒(méi)有識(shí)別到二維碼;
"52127": "PGV connection error",pgv 連接錯(cuò)誤;
"52128": "PGV info with mismatched device id",pgv 與設(shè)備 id 不匹配。




 投訴建議
投訴建議
提交
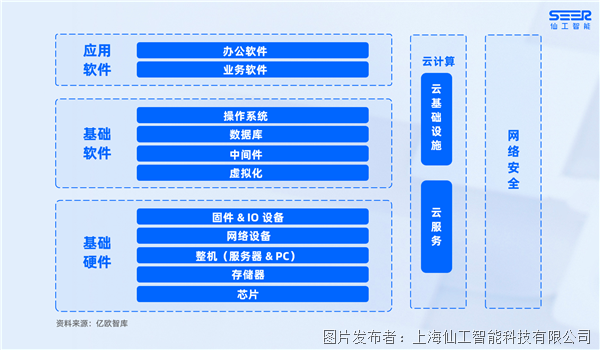
仙工智能數(shù)字化系統(tǒng)全面支持信創(chuàng)

仙工智能榮登「2024 上海中小企業(yè)最具成長(zhǎng)品牌榜百佳企業(yè)」

展會(huì)直擊丨仙工智能機(jī)器人新品上線,閃耀 LET 廣州物流展

展會(huì)預(yù)告丨新品系列搶「仙」看,LET 即將驚喜揭秘
仙工智能 3D 特征定位:場(chǎng)景參考物限制更小,定位穩(wěn)定性更高