SoftServo(軟贏) MXR2 運動控制

詳細介紹
概述
WMX2是在Windows環(huán)境下編程的,基于EtherCAT總線和軟件運動控制的創(chuàng)新型的高端的通用運動控制系統(tǒng),最多可以控制64軸,256個獨立的運動控制通道/線程,有超過500個運動控制函數(shù),包含EtherCAT網(wǎng)絡管理的函數(shù)。
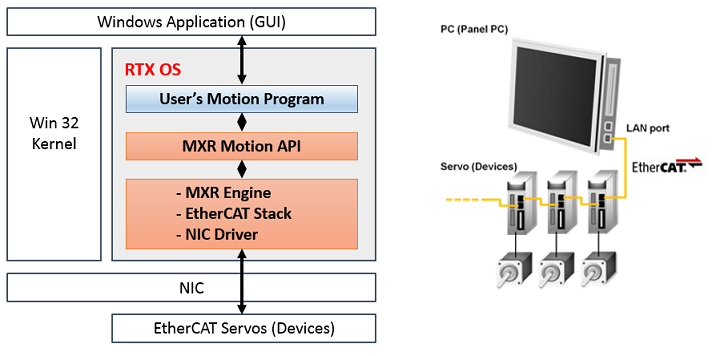
MXR2是WMX2的高級版本,包含RTX SDK的實時開發(fā)和編譯環(huán)境,可以讓開發(fā)者在實時環(huán)境下使用C++編寫實時算法,對500多個運動函數(shù)進行實時的調(diào)用和執(zhí)行。具體的運動控制的功能與特點可以參考WMX2的規(guī)格。
注意事項與應用
I. 使用Viusal Studio C++編程
II. 需要RTX SDK,對編程開發(fā)有較高要求(掌握RTX實時編程、共享內(nèi)存管理等)
III.適用于用戶的核心實時算法的封裝,如
① 抑制振動
② 防碰撞檢測與處理
③ 異形機器人正反解算法
④ 用戶自定義加減速曲線-Cyclic Buffer
V.可調(diào)用實時相機類庫-Matrox Imaging Library (MIL)
MXR2架構(gòu)